

تصور کنید رباتی را که بدون خستگی در کارخانهای پیچیدهترین قطعات را مونتاژ میکند، یا رباتی جراح که با دقتی میلیمتری عملیاتهای حساس پزشکی را انجام میدهد. این صحنهها دیگر متعلق به آیندهای دور نیستند؛ بلکه بخش جداییناپذیر دنیای امروز ما شدهاند. اما پشت این عملکردهای حیرتانگیز چه چیزی نهفته است؟ پاسخ ساده است: برنامه نویسی رباتیک. در دنیایی که فناوری با شتابی بیسابقه در حال پیشرفت است، رباتها دیگر تنها ابزارهای مکانیکی نیستند، بلکه با هوشی که از طریق برنامهنویسی به آنها داده میشود، تبدیل به تصمیم گیرندههایی هوشمند شدهاند. در این مقاله از الکامکو، سفری خواهیم داشت به قلب این تکنولوژی شگفتانگیز؛ جایی که کدها زندگی میگیرند و ماشینها به حرکت درمیآیند.
رباتیک چیست؟
رباتیک (Robotics) شاخهای میانرشتهای از مهندسی و علوم کامپیوتر است که به طراحی، ساخت، برنامهنویسی و بهکارگیری رباتها میپردازد. رباتها سیستمهای الکترومکانیکی یا نرمافزاری هوشمندی هستند که میتوانند وظایف مشخصی را بهصورت خودکار یا با حداقل دخالت انسان انجام دهند. این حوزه ترکیبی از دانشهایی مانند مکانیک، الکترونیک، کنترل، هوش مصنوعی و برنامهنویسی است که با هدف ساخت ماشینهایی طراحی میشود که بتوانند فعالیتهای انسانگونه انجام دهند — از حرکت و جابهجایی گرفته تا تصمیمگیری پیچیده.
اهمیت رباتیک در دنیای مدرن
در عصر حاضر، رباتیک تنها یک حوزه تحقیقاتی یا صنعتی نیست، بلکه بخشی از زندگی روزمره ما شده است. از رباتهای صنعتی در خطوط تولید پیشرفته گرفته تا رباتهای خدماتی در بیمارستانها، رباتهای جراح، پهپادهای کشاورزی، یا حتی جاروبرقیهای هوشمند در خانهها — همگی نشان از نقش حیاتی رباتها دارند.
چرا رباتیک اهمیت دارد؟
-
✅ افزایش بهرهوری و دقت در صنایع مختلف
-
✅ کاهش ریسک برای انسان در محیطهای خطرناک (مانند معادن، فضا، اعماق دریا یا مناطق آلوده)
-
✅ کمک به پیشرفت علم پزشکی با رباتهای جراحی و توانبخشی
-
✅ پشتیبانی از زندگی روزمره و راحتتر کردن کارهای خانگی
-
✅ نقش مهم در آینده حمل و نقل با خودروها و پهپادهای خودران
در دنیایی که به سرعت دیجیتالی میشود، رباتیک مرز میان انسان و ماشین را بازتعریف میکند و بستری میسازد برای آیندهای هوشمندتر، ایمنتر و کارآمدتر.
همچنین بخوانید: اندروید استودیو چیست؟ | نصب اندروید استودیو » آموزش اندروید استودیو
نقش برنامه نویسی در کنترل و هدایت رباتها
درست همانطور که مغز انسان مسئول پردازش اطلاعات و صدور فرمان به اعضای بدن است، برنامهنویسی مغز ربات بهشمار میرود. بدون برنامهنویسی، حتی پیشرفتهترین رباتها نیز تنها تودهای از فلز، سیم و مدار هستند. این کدها و الگوریتمها هستند که به رباتها «تفکر»، «درک» و «تصمیمگیری» میدهند.
برنامهنویسی چه نقشی در عملکرد ربات دارد؟
-
دریافت دادهها از حسگرها (Sensors): رباتها از طریق حسگرها، محیط پیرامون خود را درک میکنند. برنامهنویسی مشخص میکند که چگونه دادهها مانند دما، فاصله، نور یا حرکت تفسیر و پردازش شوند.
-
پردازش اطلاعات و تصمیمگیری: الگوریتمهای برنامهنویسی تجزیه و تحلیل دادهها را انجام میدهند و تعیین میکنند ربات چه واکنشی نشان دهد — مثلاً دور زدن مانع، توقف، یا تغییر جهت.
-
ارسال دستورات به عملگرها (Actuators): برنامه، فرمان نهایی را به موتورها، بازوها یا چرخها میفرستد تا ربات حرکت یا عملی خاص انجام دهد.
-
هماهنگی وظایف پیچیده: رباتها برای انجام وظایف ترکیبی (مثل برداشتن شیء، جابهجایی، مرتبسازی) نیاز به ساختارهای کنترلی پیچیده دارند که با برنامهنویسی قابل مدیریت هستند.
-
یادگیری و سازگاری: در رباتهای پیشرفتهتر، برنامهنویسی با بهرهگیری از هوش مصنوعی و یادگیری ماشین، امکان یادگیری از تجربهها و سازگاری با شرایط جدید را فراهم میکند.
برنامه نویسی رباتیک چیست؟
برنامه نویسی رباتیک فرآیند نوشتن دستورالعملهایی است که ربات با پیروی از آنها میتواند یک یا چند وظیفه مشخص را بهصورت خودکار انجام دهد. این دستورات میتوانند ساده باشند؛ مانند روشن و خاموش شدن یک موتور، یا پیچیده؛ مانند تشخیص چهره و دنبال کردن یک مسیر مشخص در محیط پویا. در واقع، برنامهنویسی زبان ارتباطی بین انسان و ربات است. ما از طریق کدها با رباتها صحبت میکنیم و به آنها میگوییم «چه کاری»، «در چه زمانی» و «چگونه» انجام دهند.
توضیح فرآیند برنامهنویسی رباتها برای انجام وظایف خاص
فرآیند برنامه نویسی رباتها بهطور کلی شامل مراحل زیر است:
-
تعریف هدف یا وظیفه: مشخص کردن اینکه ربات قرار است چه کاری انجام دهد (مثل جابهجایی شیء، حرکت در مسیر خاص یا انجام یک تست صنعتی).
-
انتخاب زبان برنامه نویسی و محیط توسعه: بسته به نوع ربات و کاربرد آن، زبانهایی مانند Python، C/C++، یا زبانهای اختصاصی ربات صنعتی (مثل RAPID یا KRL) انتخاب میشوند.
-
کدنویسی منطق عملکرد: شامل نوشتن دستورات منطقی برای پاسخ به رویدادهای مختلف محیطی و داخلی ربات، مانند “اگر سنسور فاصله کمتر از ۵ سانتیمتر را نشان داد، توقف کن”.
-
ارسال برنامه به کنترلر ربات: کد نوشتهشده به سختافزار ربات منتقل میشود، جایی که توسط میکروکنترلر یا PLC اجرا میگردد.
-
تست، خطایابی و بهینهسازی: عملکرد ربات بررسی شده و در صورت لزوم اصلاحاتی در برنامه انجام میشود تا رفتار دقیقتر و بهینهتری حاصل شود.
نقش میکروکنترلرها و PLCها در اجرای دستورات برنامه نویسی
میکروکنترلرها (Microcontrollers)
میکروکنترلرها تراشههای کوچکی هستند که در رباتهای کوچک، آموزشی یا سفارشیسازیشده استفاده میشوند (مثل Arduino، STM32، ESP32). این قطعات مسئول دریافت برنامه از کاربر، پردازش آن، کنترل ورودی/خروجیها و اجرای دستورات هستند.
ویژگیها:
-
ارزان، سبک و مناسب برای پروژههای ساده یا آموزشی
-
امکان تعامل مستقیم با حسگرها و موتورهای کوچک
-
پشتیبانی از زبانهایی مثل C، C++، Python
PLCها (Programmable Logic Controllers)
PLCها کنترلکنندههایی صنعتی هستند که برای مدیریت فرآیندهای پیچیده در محیطهای صنعتی طراحی شدهاند. آنها در رباتهای صنعتی برای اجرای دقیق و ایمن دستورات برنامهنویسیشده استفاده میشوند.
ویژگیها:
-
بسیار مقاوم در برابر نویز، رطوبت و حرارت
-
مناسب برای کنترل فرآیندهای تکراری و دقیق در کارخانهها
-
برنامهنویسی معمولاً با زبان Ladder Logic یا Structured Text
اصول و مبانی برنامه نویسی رباتیک
برنامه نویسی رباتیک شامل مجموعهای از اصول و مبانی است که به ربات امکان میدهد تا وظایف خود را به طور خودکار و هوشمندانه انجام دهد. این اصول عبارتند از:
- حسگری و ادراک (Sensing and Perception): رباتها برای تعامل با محیط خود نیاز به درک آن دارند. این درک از طریق حسگرهای مختلف مانند دوربینها، سنسورهای مجاورت، سنسورهای نیرو و غیره به دست میآید. برنامه نویسی رباتیک شامل پردازش دادههای حسگرها برای استخراج اطلاعات مفید و تصمیمگیری است.
- حرکت و عملگرها (Motion and Actuation): پس از درک محیط و تصمیمگیری، ربات باید بتواند در آن حرکت کند و اقداماتی را انجام دهد. این کار توسط عملگرها مانند موتورها، سیلندرهای هیدرولیک یا پنوماتیک و غیره انجام میشود. برنامهنویسی شامل کنترل این عملگرها برای دستیابی به حرکات و وظایف مورد نظر است.
- کنترل و تصمیمگیری (Control and Decision-Making): هسته اصلی برنامه نویسی رباتیک، الگوریتمهای کنترلی و تصمیمگیری هستند. این الگوریتمها دادههای حسگرها را دریافت کرده، وضعیت فعلی ربات و محیط را ارزیابی میکنند و سپس دستورات لازم را برای عملگرها صادر میکنند تا ربات به هدف خود برسد.
- برنامهریزی (Planning): برای انجام وظایف پیچیدهتر، رباتها نیاز به برنامهریزی دارند. این شامل تعیین توالی اقدامات لازم برای رسیدن به یک هدف خاص، مسیریابی در محیط و اجتناب از موانع است.
- تعامل (Interaction): بسیاری از رباتها برای انجام وظایف خود نیاز به تعامل با انسانها یا سایر رباتها دارند. برنامه نویسی رباتیک شامل طراحی رابطهای کاربری مناسب و الگوریتمهایی برای برقراری ارتباط و همکاری مؤثر است.
مفاهیم پایه مانند Degrees of Freedom (DoF) و اهمیت آنها در حرکت ربات
درجه آزادی (Degrees of Freedom – DoF)
به تعداد حرکات مستقل یک سیستم رباتیک اشاره دارد. به عبارت دیگر، DoF نشان میدهد که یک ربات در چند جهت میتواند حرکت کند و چند نوع چرخش مستقل میتواند داشته باشد.
یک جسم صلب در فضای سه بعدی میتواند ۶ درجه آزادی داشته باشد: ۳ حرکت انتقالی در راستای محورهای X، Y و Z و ۳ حرکت دورانی حول این محورها (Roll، Pitch و Yaw).
در رباتیک، هر مفصل متحرک یک درجه آزادی را به ربات اضافه میکند. برای مثال:
- یک مفصل چرخشی ساده حول یک محور، ۱ DoF دارد.
- یک مفصل کروی (مانند مفصل شانه انسان) که امکان چرخش حول سه محور مختلف را فراهم میکند، ۳ DoF دارد.
اهمیت DoF در حرکت ربات
تعداد درجات آزادی یک ربات به طور مستقیم بر قابلیتها و انعطافپذیری حرکتی آن تأثیر میگذارد:
- انعطافپذیری بیشتر: ربات با DoF بیشتر میتواند به نقاط بیشتری در فضای کاری خود دسترسی پیدا کند و حرکات پیچیدهتری را انجام دهد. این امر برای وظایفی مانند مونتاژ قطعات با هندسههای پیچیده، جوشکاری در زوایای مختلف یا نقاشی سطوح منحنی بسیار مهم است.
- اجتناب از موانع: رباتی با DoF بیشتر، در صورت مواجهه با مانع، گزینههای بیشتری برای تغییر مسیر و ادامه حرکت به سمت هدف خود دارد.
- تقلید حرکات انسان: برای رباتهایی که قرار است با انسانها همکاری کنند یا حرکات آنها را تقلید کنند (مانند رباتهای انساننما)، داشتن DoF کافی برای تقلید دامنه حرکتی انسان ضروری است.
- پیچیدگی کنترل: با افزایش DoF، کنترل ربات نیز پیچیدهتر میشود. هماهنگ کردن حرکات چندین مفصل برای دستیابی به یک حرکت مطلوب در فضای کاری نیازمند الگوریتمهای کنترلی پیشرفتهتری است.
- هزینه و وزن: به طور کلی، رباتهایی با DoF بیشتر معمولاً هزینه ساخت و وزن بیشتری دارند.
انتخاب تعداد مناسب DoF برای یک ربات به نوع وظیفهای که قرار است انجام دهد بستگی دارد. برای وظایف سادهتر، ممکن است رباتی با DoF کمتر کافی باشد و استفاده از رباتی با DoF بیش از حد میتواند منجر به پیچیدگی و هزینه غیرضروری شود.
دوره متخصص فلاتر (Flutter) | دوره آموزش فلاتر پروژه محور از مبتدی تا پیشرفته
نقش حسگرها و محرکها در تعامل ربات با محیط
حسگرها (Sensors)
حسگرها ابزارهای حسی ربات هستند که اطلاعاتی را از محیط جمعآوری میکنند و آنها را به سیگنالهای الکتریکی قابل پردازش توسط کنترلر ربات تبدیل میکنند. نقش حسگرها در تعامل ربات با محیط بسیار حیاتی است:
- درک محیط: حسگرها به ربات امکان میدهند تا ویژگیهای مختلف محیط مانند فاصله تا اشیاء، وجود موانع، نور، صدا، دما، نیرو، گشتاور و غیره را درک کند.
- تعیین وضعیت: حسگرها اطلاعاتی در مورد وضعیت خود ربات، مانند موقعیت مفاصل، سرعت حرکت، جهتگیری و غیره را فراهم میکنند.
- برنامهریزی و کنترل: دادههای حسگرها برای برنامهریزی مسیر حرکت، تصمیمگیری در مورد اقدامات بعدی و کنترل دقیق عملگرها استفاده میشوند.
- ایمنی: حسگرها میتوانند برای تشخیص خطرات احتمالی و جلوگیری از برخورد ربات با موانع یا انسانها استفاده شوند.
انواع مختلفی از حسگرها در رباتیک استفاده میشوند، از جمله:
- حسگرهای مجاورت: برای تشخیص وجود اشیاء در نزدیکی ربات بدون تماس فیزیکی (مانند سنسورهای مادون قرمز و اولتراسونیک).
- دوربینها: برای دریافت اطلاعات بصری از محیط و تشخیص اشیاء، چهرهها، خطوط و غیره.
- حسگرهای نیرو و گشتاور: برای اندازهگیری نیروها و گشتاورهای وارد شده به ربات یا اعمال شده توسط آن.
- انکودرها: برای اندازهگیری موقعیت و سرعت چرخش موتورها و مفاصل.
- IMU (واحد اندازهگیری اینرسی): برای اندازهگیری شتاب خطی و سرعت زاویهای ربات.
- LiDAR و رادار: برای ایجاد نقشههای سه بعدی از محیط و تشخیص فاصله و سرعت اشیاء.
محرکها (Actuators)
محرکها اجزای مکانیکی ربات هستند که انرژی را (معمولاً الکتریکی، هیدرولیکی یا پنوماتیک) به حرکت تبدیل میکنند. نقش محرکها در تعامل ربات با محیط عبارت است از:
- ایجاد حرکت: محرکها مسئول حرکت دادن مفاصل ربات، چرخها، بازوها و سایر اجزای متحرک هستند.
- انجام وظایف: محرکها به ربات امکان میدهند تا وظایف فیزیکی مانند برداشتن و جابجایی اشیاء، باز کردن و بستن درها، انجام عملیات صنعتی و غیره را انجام دهد.
- اعمال نیرو و گشتاور: برخی از محرکها (مانند موتورهای گشتاور بالا یا سیلندرهای هیدرولیک) میتوانند نیروها و گشتاورهای قابل توجهی را برای انجام وظایف سنگین اعمال کنند.
انواع رایج محرکها در رباتیک عبارتند از:
- موتورهای الکتریکی: شامل موتورهای DC، AC، سروو موتورها و استپر موتورها که برای ایجاد حرکات چرخشی و خطی دقیق استفاده میشوند.
- سیلندرهای هیدرولیک و پنوماتیک: برای ایجاد حرکات خطی با قدرت بالا.
- عملگرهای پنوماتیک چرخشی: برای ایجاد حرکات چرخشی با زوایای محدود.
- ماهیچههای مصنوعی: مواد هوشمندی که در اثر تحریک الکتریکی یا شیمیایی منقبض یا منبسط میشوند و میتوانند حرکات ظریف و شبیه به عضلات انسان ایجاد کنند.
تعامل مؤثر یک ربات با محیط نیازمند هماهنگی دقیق بین حسگرها و محرکها است. حسگرها اطلاعات محیط را جمعآوری میکنند، کنترلر ربات این اطلاعات را پردازش میکند و بر اساس آن دستورات لازم را به محرکها ارسال میکند تا ربات واکنش مناسب را نشان دهد و وظیفه خود را انجام دهد. این یک حلقه بازخورد (Feedback Loop) است که اساس عملکرد بسیاری از سیستمهای رباتیک را تشکیل میدهد.
مبانی کنترل و الگوریتمهای پایه در رباتیک
مبانی کنترل در رباتیک
هدف از کنترل در رباتیک، هدایت ربات به گونهای است که به اهداف مورد نظر دست یابد و در عین حال ایمنی و عملکرد مطلوب را حفظ کند. برخی از مفاهیم پایه در کنترل رباتیک عبارتند از:
- سیستم حلقه باز (Open-Loop Control): در این روش، دستورات کنترلی از پیش تعیین شده بدون در نظر گرفتن وضعیت فعلی ربات یا محیط به عملگرها ارسال میشوند. این روش ساده است اما در مواجهه با تغییرات و عدم قطعیتها عملکرد ضعیفی دارد.
- سیستم حلقه بسته (Closed-Loop Control): در این روش، از حسگرها برای اندازهگیری وضعیت فعلی ربات استفاده میشود و این اطلاعات به یک کنترلر بازخورد داده میشود. کنترلر با مقایسه وضعیت فعلی با وضعیت مطلوب، سیگنالهای کنترلی مناسب را برای عملگرها تولید میکند تا خطا را کاهش دهد. این روش در مواجهه با اختلالات و عدم قطعیتها بسیار مؤثرتر است.
- کنترل موقعیت (Position Control): هدف، کنترل موقعیت مکانی یا زاویهای اجزای ربات (مانند بازو یا مفاصل) برای رسیدن به یک نقطه یا دنبال کردن یک مسیر مشخص است.
- کنترل سرعت (Velocity Control): هدف، کنترل سرعت حرکت اجزای ربات با دقت مورد نظر است.
- کنترل نیرو (Force Control): هدف، کنترل نیرویی است که ربات با محیط یا اشیاء در تماس اعمال میکند. این امر برای وظایفی مانند مونتاژ دقیق یا کار با اشیاء حساس مهم است.
- کنترل امپدانس (Impedance Control): این روش سعی در کنترل رابطه بین نیرو و حرکت ربات دارد و به ربات اجازه میدهد تا به طور انعطافپذیر با محیط تعامل کند.
الگوریتمهای پایه در رباتیک
الگوریتمها نقش اساسی در کنترل و برنامهریزی حرکات رباتها دارند. برخی از الگوریتمهای پایه عبارتند از:
-
سینماتیک (Kinematics):
- سینماتیک مستقیم (Forward Kinematics): محاسبه موقعیت و جهتگیری نهایی بازوی ربات با داشتن مقادیر زوایای مفاصل آن.
- سینماتیک معکوس (Inverse Kinematics): محاسبه مقادیر زوایای مفاصل مورد نیاز برای رسیدن به یک موقعیت و جهتگیری مشخص در فضای کاری. این معمولاً یک مسئله پیچیدهتر با چندین جواب ممکن است.
-
برنامهریزی مسیر (Path Planning): یافتن یک مسیر بدون برخورد از نقطه شروع به نقطه پایان در فضای کاری ربات، با در نظر گرفتن موانع. الگوریتمهای رایج شامل:
- A Search:* یک الگوریتم جستجوی آگاهانه که از یک تابع هیوریستیک برای تخمین هزینه رسیدن به هدف استفاده میکند.
- Dijkstra’s Algorithm: یک الگوریتم جستجوی گراف که کوتاهترین مسیر را بین دو گره پیدا میکند.
- Rapidly-exploring Random Trees (RRT): یک الگوریتم مبتنی بر نمونهبرداری که به سرعت فضای جستجو را برای یافتن یک مسیر مناسب کاوش میکند.
- Probabilistic Roadmaps (PRM): یک الگوریتم مبتنی بر نمونهبرداری که یک گراف از مسیرهای بدون برخورد را در فضای کاری ایجاد میکند.
-
کنترل حرکت (Motion Control): الگوریتمهایی که برای کنترل دقیق حرکت مفاصل ربات برای دنبال کردن یک مسیر یا رسیدن به یک موقعیت خاص استفاده میشوند.
- PID Controller (Proportional-Integral-Derivative): یک الگوریتم کنترلی حلقه بسته که به طور گسترده در رباتیک برای کنترل موقعیت، سرعت و نیرو استفاده میشود.
- Gravity Compensation: الگوریتمی که برای مقابله با اثر نیروی جاذبه بر مفاصل ربات استفاده میشود، به ویژه در رباتهای با بازوهای سنگین.
- Inverse Dynamics Control: یک روش کنترل پیشرفته که از مدل دینامیکی ربات برای محاسبه گشتاورهای مورد نیاز برای دستیابی به حرکت مطلوب استفاده میکند.
-
محلیسازی (Localization): تعیین موقعیت ربات در محیط. الگوریتمهای رایج شامل:
- Odometry: استفاده از اطلاعات مربوط به حرکت چرخها یا مفاصل برای تخمین موقعیت ربات.
- Kalman Filter: یک الگوریتم تخمین حالت بهینه که دادههای حسگرهای مختلف را با یک مدل حرکتی برای ارائه یک تخمین دقیق از وضعیت ربات ترکیب میکند.
- Particle Filter: یک روش احتمالی برای تخمین وضعیت ربات با استفاده از مجموعهای از ذرات (فرضیات).
-
SLAM (Simultaneous Localization and Mapping): الگوریتمهایی که به ربات امکان میدهند به طور همزمان نقشه محیط را ایجاد کند و موقعیت خود را در آن نقشه تخمین بزند.
اینها تنها برخی از اصول و الگوریتمهای پایه در برنامهنویسی رباتیک هستند. با پیشرفت این حوزه برنامه نویسی، الگوریتمها و تکنیکهای پیچیدهتر و هوشمندتری نیز در حال توسعه هستند که به رباتها امکان انجام وظایف پیچیدهتر و تعامل هوشمندانهتر با محیط را میدهند.
زبان های برنامه نویسی مورد استفاده در رباتیک
در دنیای برنامهنویسی رباتیک، زبانهای مختلفی برای اهداف گوناگون مورد استفاده قرار میگیرند. انتخاب زبان مناسب بستگی به نوع ربات، پیچیدگی وظایف آن، سیستم عامل مورد استفاده و همچنین تجربه و ترجیحات برنامهنویس دارد. در اینجا به برخی از مهمترین و پرکاربردترین زبانهای برنامهنویسی در رباتیک اشاره میکنیم:
۱. زبان برنامه نویسی رباتیک: سی (C)

زبان C یک زبان برنامهنویسی سطح میانی، قدرتمند و کارآمد است که به دلیل کنترل دقیق بر سختافزار و عملکرد بالا، نقش بسیار مهمی در توسعه سیستمهای عامل، درایورهای سختافزاری و سیستمهای تعبیهشده دارد و همچنان در برخی زمینههای رباتیک نیز کاربرد دارد.
ویژگیها:
- سطح میانی: بین زبانهای سطح بالا (مانند پایتون و جاوا) و زبانهای سطح پایین (مانند اسمبلی) قرار دارد و امکان دسترسی مستقیم به حافظه و سختافزار را فراهم میکند.
- کارآمد و سریع: به دلیل کامپایل شدن مستقیم به کد ماشین و کنترل دقیق بر منابع، برنامههای C معمولاً بسیار سریع و کارآمد هستند.
- قابل حمل (Portable): کدهای C را میتوان با حداقل تغییرات بر روی معماریهای سختافزاری و سیستمعاملهای مختلف کامپایل و اجرا کرد.
- پایه بسیاری از زبانهای دیگر: بسیاری از زبانهای برنامهنویسی دیگر مانند C++، جاوا و پایتون از مفاهیم و ساختار C الهام گرفتهاند.
- کنترل دقیق بر حافظه: امکان تخصیص و آزادسازی دستی حافظه وجود دارد که در برنامهنویسی سیستم و تعبیهشده بسیار مهم است.
کاربردها در رباتیک:
- برنامهنویسی سیستمهای تعبیهشده (Embedded Systems): به دلیل کارایی و کنترل سختافزاری، برای برنامهنویسی میکروکنترلرها و پردازندههای مورد استفاده در رباتها بسیار رایج است.
- توسعه درایورهای سختافزاری: برای نوشتن درایورهایی که ربات را قادر به تعامل با حسگرها و عملگرهای مختلف میکنند.
- کنترلکنندههای بلادرنگ (Real-time Controllers): در سیستمهایی که نیاز به پاسخهای سریع و دقیق به رویدادها دارند، از C استفاده میشود.
- برنامهنویسی سطح پایین: در مواردی که نیاز به بهینهسازی عملکرد در سطح سختافزار وجود دارد.
- پایه برخی از کتابخانههای رباتیک: برخی از کتابخانهها و فریمورکهای رباتیک از C به عنوان زبان پایه استفاده میکنند یا رابطهایی به زبان C ارائه میدهند.
مزایا در رباتیک:
- عملکرد بالا و سرعت: برای کاربردهایی که نیاز به پردازش سریع و پاسخهای بلادرنگ دارند، بسیار مناسب است.
- کنترل مستقیم بر سختافزار: امکان تعامل نزدیک با حسگرها و عملگرها در سطح پایین را فراهم میکند.
- مصرف منابع کم: برنامههای C معمولاً حافظه و پردازنده کمتری مصرف میکنند، که برای سیستمهای تعبیهشده با منابع محدود حیاتی است.
- پایداری و قابلیت اطمینان: در سیستمهای حیاتی و صنعتی که پایداری اهمیت دارد، C یک انتخاب مطمئن است.
مثال ساده (کنترل یک LED متصل به یک پین میکروکنترلر):
این مثال فرضی است و نحوه تعامل با سختافزار به نوع میکروکنترلر بستگی دارد.
C
#include <stdio.h>
// فرض کنید یک کتابخانه برای کنترل پین های GPIO وجود دارد
#include "gpio.h"
#define LED_PIN 13
int main() {
// مقداردهی اولیه پین LED به عنوان خروجی
gpio_init(LED_PIN, OUTPUT);
// روشن کردن LED برای ۵ ثانیه
gpio_write(LED_PIN, HIGH);
printf("LED روشن شد.\n");
delay_ms(۵۰۰۰);
// خاموش کردن LED
gpio_write(LED_PIN, LOW);
printf("LED خاموش شد.\n");
return ۰;
}
// توابع فرضی از کتابخانه gpio.h
// void gpio_init(int pin, int mode);
// void gpio_write(int pin, int value);
// void delay_ms(int milliseconds);
در این مثال فرضی، از یک کتابخانه gpio.h برای کنترل یک پین GPIO استفاده شده است. تابع gpio_init پین مورد نظر را به عنوان خروجی تنظیم میکند، gpio_write مقدار ولتاژ پین را برای روشن یا خاموش کردن LED تغییر میدهد و delay_ms یک تاخیر ایجاد میکند. این یک مثال بسیار ساده از نحوه تعامل C با سختافزار در یک سیستم تعبیهشده است.
۲. زبان برنامه نویسی سی پلاس پلاس (++C)

زبان C++ یک زبان برنامهنویسی چندمنظوره، شیءگرا و سطح میانی است که به عنوان توسعهای از زبان C شناخته میشود و قابلیتهای شیءگرایی، مدیریت حافظه پیشرفتهتر و امکانات سطح بالاتری را برای توسعه نرمافزارهای پیچیده فراهم میکند.
ویژگیها:
- شیءگرا (Object-Oriented): از مفاهیم کلاسها، اشیاء، وراثت، چندشکلی و کپسولهسازی به طور کامل پشتیبانی میکند.
- عملکرد بالا: به دلیل کامپایل شدن به کد ماشین و امکان مدیریت دقیق منابع، برنامههای C++ معمولاً عملکرد بسیار خوبی دارند.
- کنترل دقیق بر حافظه: امکان مدیریت دستی حافظه (با استفاده از اشارهگرها و تخصیص پویا) و همچنین استفاده از اشیاء هوشمند برای مدیریت خودکار حافظه وجود دارد.
- کتابخانه استاندارد قدرتمند (STL): شامل مجموعهای غنی از کلاسها و الگوریتمهای آماده برای ساختارهای داده، الگوریتمها، ورودی/خروجی و غیره.
- سازگاری با C: بیشتر کدهای C میتوانند در یک کامپایلر C++ کامپایل شوند و امکان استفاده از کتابخانههای C در پروژههای C++ وجود دارد.
کاربردها در رباتیک:
- برنامهنویسی سیستمهای پیچیده رباتیک: برای توسعه نرمافزارهای کنترلی پیشرفته، سیستمهای ادراک و برنامهریزی حرکت.
- توسعه کتابخانههای رباتیک: بسیاری از فریمورکها و کتابخانههای اصلی رباتیک مانند ROS (بخشهای اصلی)، OpenCV (بخشهای اصلی) و غیره با C++ نوشته شدهاند.
- کنترلکنندههای بلادرنگ (Real-time Controllers): به دلیل عملکرد بالا، برای سیستمهایی که نیاز به پاسخهای سریع و قابل اعتماد دارند، استفاده میشود.
- شبیهسازی رباتیک: برای توسعه موتورهای شبیهسازی پیچیده و کارآمد.
- بینایی ماشین و پردازش تصویر: به دلیل سرعت و کتابخانههای قدرتمند، در توسعه الگوریتمهای بینایی ماشین کاربرد فراوانی دارد.
مزایا در رباتیک:
- عملکرد بسیار بالا: برای محاسبات سنگین و پردازش دادههای حسگر در زمان واقعی ایدهآل است.
- انعطافپذیری بالا: امکان برنامه نویسی در سطوح مختلف (از سطح پایین سختافزار تا سطح بالای منطق برنامه) را فراهم میکند.
- جامعه بزرگ و منابع فراوان: یک جامعه توسعه دهنده فعال و منابع آموزشی گسترده برای ++C وجود دارد.
- قابلیت استفاده مجدد کد: با استفاده از برنامهنویسی شیءگرا و STL، امکان ایجاد کدهای ماژولار و قابل استفاده مجدد فراهم میشود.
مثال ساده (کنترل سرعت یک موتور DC با استفاده از یک کلاس):
فرض کنید یک کلاس DCMotor برای کنترل یک موتور DC داریم:
C++
#include <iostream>
class DCMotor {
private:
int pinA;
int pinB;
int speed;
public:
DCMotor(int pinA, int pinB) : pinA(pinA), pinB(pinB), speed(۰) {
std::cout << "موتور DC در پین های " << pinA << " و " << pinB << std::endl;
}
void setSpeed(int newSpeed) {
if (newSpeed >= -۱۰۰ && newSpeed <= ۱۰۰) {
speed = newSpeed;
std::cout << "تنظیم سرعت موتور به: " << speed << "%" << std::endl;
// در یک ربات واقعی، اینجا دستورات ارسال به درایور موتور قرار میگیرد
} else {
std::cerr << "سرعت نامعتبر است. باید بین -۱۰۰ و ۱۰۰ باشد." << std::endl;
}
}
int getSpeed() const {
return speed;
}
};
int main() {
DCMotor motor1(۴, ۵);
motor1.setSpeed(۷۵);
std::cout << "سرعت فعلی موتور: " << motor1.getSpeed() << "%" << std::endl;
motor1.setSpeed(-۵۰); // چرخش در جهت مخالف
return ۰;
}
در این مثال، کلاس DCMotor با پینهای اتصال و سرعت تعریف شده است. متد setSpeed سرعت موتور را تنظیم میکند و متد getSpeed سرعت فعلی را برمیگرداند. در تابع main یک شیء از کلاس DCMotor ایجاد شده و سرعت آن تنظیم و خوانده میشود. این یک مثال ساده از استفاده از شیءگرایی در C++ برای کنترل یک جزء ربات است.
همچنین بخوانید: برنامه نویسی چیست؟ | فیلم های آموزش برنامه نویسی رایگان | پکیج های برنامه نویسی پروژه محور
۳. زبان برنامه نویسی رباتیک: پایتون (Python)

زبان Python یک زبان برنامهنویسی سطح بالا، تفسیری، چندمنظوره و با خوانایی بسیار بالا است که به دلیل سادگی و کتابخانههای قدرتمندش، در سالهای اخیر به یکی از محبوبترین زبانها در حوزه رباتیک تبدیل شده است.
ویژگیها:
- خوانایی بالا: سینتکس ساده و واضح پایتون، خواندن و نوشتن کد را آسان میکند.
- تفسیری: کد پایتون به صورت خط به خط اجرا میشود، که فرآیند توسعه و اشکالزدایی را تسریع میبخشد.
- چندمنظوره: از برنامهنویسی شیءگرا، دستوری و تابعی پشتیبانی میکند.
- کتابخانههای غنی: دارای اکوسیستم بسیار گستردهای از کتابخانهها برای زمینههای مختلف از جمله رباتیک (ROS، PyBullet)، هوش مصنوعی (TensorFlow، PyTorch، scikit-learn)، بینایی ماشین (OpenCV)، محاسبات علمی (NumPy، SciPy) و غیره.
- جامعه کاربری بزرگ و فعال: پشتیبانی و منابع آموزشی فراوانی برای پایتون در دسترس است.
کاربردها در رباتیک:
- توسعه رباتیک با ROS (Robot Operating System): پایتون یکی از زبانهای اصلی برای توسعه بستهها و نودها در ROS است.
- هوش مصنوعی و یادگیری ماشین در رباتیک: استفاده از کتابخانههایی مانند TensorFlow و PyTorch برای آموزش مدلهای هوشمند برای رباتها.
- بینایی ماشین: پردازش تصاویر و ویدئوها برای رباتها با استفاده از OpenCV و سایر کتابخانهها.
- شبیهسازی ربات: استفاده از کتابخانههایی مانند PyBullet برای شبیهسازی محیطهای رباتیک و آزمایش الگوریتمها.
- برنامهریزی مسیر و کنترل سطح بالا: پیادهسازی الگوریتمهای برنامهریزی حرکت و کنترل رفتاری رباتها.
- توسعه رابطهای کاربری: ایجاد رابطهای گرافیکی برای کنترل و نظارت بر رباتها با استفاده از کتابخانههایی مانند PyQt و Tkinter.
مزایا در رباتیک:
- توسعه سریع: سادگی زبان و وجود کتابخانههای فراوان، سرعت توسعه پروژههای رباتیک را افزایش میدهد.
- جامعه و پشتیبانی قوی: یافتن کمک و منابع آموزشی برای پایتون بسیار آسان است.
- یکپارچگی با تکنولوژیهای روز: پایتون به خوبی با حوزههای پیشرفته مانند هوش مصنوعی و یادگیری ماشین ادغام شده است.
- انعطافپذیری بالا: برای طیف گستردهای از وظایف در رباتیک قابل استفاده است.
- محبوبیت و تقاضای بالا: مهارت در پایتون یک دارایی ارزشمند در بازار کار رباتیک محسوب میشود.
مثال ساده (کنترل سرعت دو موتور یک ربات چرخدار):
فرض کنید دو موتور با نامهای left_motor و right_motor داریم و میخواهیم سرعت آنها را کنترل کنیم:
Python
class MotorController:
def __init__(self, left_motor_pin, right_motor_pin):
self.left_motor_pin = left_motor_pin
self.right_motor_pin = right_motor_pin
print("کنترل کننده موتور инициализирован شد.")
def set_speed(self, left_speed, right_speed):
print(f"تنظیم سرعت موتور چپ به: {left_speed}%")
print(f"تنظیم سرعت موتور راست به: {right_speed}%")
# در یک ربات واقعی، اینجا دستورات ارسال به درایورهای موتور قرار میگیرد
# ایجاد یک شیء از کنترل کننده موتور
controller = MotorController(۲, ۳)
# تنظیم سرعت موتورها
controller.set_speed(۵۰, ۶۰)
در این مثال، یک کلاس MotorController تعریف شده است که وظیفه کنترل سرعت موتورهای ربات را بر عهده دارد. متد set_speed مقادیر سرعت مورد نظر را دریافت کرده و آنها را (به صورت فرضی) به موتورها اعمال میکند. در یک ربات واقعی، این متد شامل کد برای تعامل با سختافزار خواهد بود.
همچنین بخوانید: هزینه کلاس های برنامه نویسی چقدر است؟
۴. زبان برنامه نویسی رباتیک: جاوا (Java)

زبان Java یک زبان برنامهنویسی شیءگرا، چندسکویی و سطح بالاست که به دلیل شعار “یک بار بنویس، همه جا اجرا کن” (Write Once, Run Anywhere – WORA) مشهور است.
ویژگیها:
- شیءگرا (Object-Oriented): از مفاهیم اصلی شیءگرایی مانند کلاسها، اشیاء، وراثت، چندشکلی و کپسولهسازی پشتیبانی میکند.
- چندسکویی (Cross-Platform): برنامههای جاوا بر روی ماشین مجازی جاوا (JVM) اجرا میشوند، که امکان اجرای آنها را بر روی سیستمعاملهای مختلف (ویندوز، لینوکس، macOS و غیره) فراهم میکند.
- دارای مدیریت حافظه خودکار (Garbage Collection): نیازی به مدیریت دستی حافظه نیست و JVM به طور خودکار حافظه استفاده نشده را بازیافت میکند.
- کتابخانههای استاندارد غنی: مجموعهای وسیع از کلاسها و رابطها برای انجام کارهای مختلف، از جمله ورودی/خروجی، شبکه، رابط کاربری گرافیکی و غیره.
- جامعه کاربری بزرگ: یک جامعه توسعهدهنده فعال و بزرگ که منابع آموزش برنامه نویسی جاوا و پشتیبانی فراوانی را ارائه میدهد.
کاربردها در رباتیک:
- توسعه سیستمهای رباتیک پیچیده: به دلیل قابلیت اطمینان و مقیاسپذیری، برای توسعه سیستمهای رباتیک بزرگ و پیچیده استفاده میشود.
- برنامهنویسی شبکههای رباتیک: برای ایجاد ارتباط و هماهنگی بین چندین ربات یا بین ربات و سیستمهای مرکزی.
- توسعه نرمافزارهای کنترل و نظارت: ایجاد برنامههایی برای کنترل رفتار رباتها و نظارت بر عملکرد آنها.
- در برخی کاربردهای هوش مصنوعی و یادگیری ماشین: اگرچه پایتون در این زمینهها رایجتر است، اما جاوا نیز برای پیادهسازی برخی الگوریتمها و سیستمهای هوشمند استفاده میشود.
مزایا در رباتیک:
- قابلیت اطمینان و پایداری: JVM به مدیریت خطاها کمک میکند و برنامههای جاوا معمولاً پایدار هستند.
- مقیاسپذیری: معماری جاوا برای ساخت سیستمهای بزرگ و مقیاسپذیر مناسب است.
- جامعه و منابع فراوان: یافتن راه حل برای مشکلات و یادگیری مفاهیم جدید برنامه نویسی آسانتر است.
- مناسب برای سیستمهای توزیعشده: قابلیتهای شبکه جاوا برای ساخت سیستمهای رباتیک توزیعشده مفید است.
مثال ساده (کنترل یک بازوی ربات فرضی با استفاده از رابط):
فرض کنید یک رابط ArmController داریم و یک کلاس SimpleArm که آن را پیادهسازی میکند:
Java
interface ArmController {
void moveJoint(int jointIndex, double angle);
}
class SimpleArm implements ArmController {
private double[] jointAngles;
public SimpleArm(int numJoints) {
jointAngles = new double[numJoints];
}
@Override
public void moveJoint(int jointIndex, double angle) {
if (jointIndex >= ۰ && jointIndex < jointAngles.length) {
jointAngles[jointIndex] = angle;
System.out.println("مفصل " + jointIndex + " به زاویه " + angle + " درجه حرکت کرد.");
} else {
System.out.println("مفصل با اندیس " + jointIndex + " وجود ندارد.");
}
}
}
public class RobotControlExample {
public static void main(String[] args) {
SimpleArm arm = new SimpleArm(۳); // بازوی با ۳ مفصل
arm.moveJoint(۰, ۴۵.۰);
arm.moveJoint(۱, ۹۰.۰);
arm.moveJoint(۲, ۰.۰);
}
}
در این مثال، یک رابط ArmController برای تعریف عملکرد کنترل بازو و یک کلاس SimpleArm برای پیادهسازی آن ایجاد شده است. در متد main یک شیء از SimpleArm ساخته شده و متد moveJoint آن برای حرکت دادن مفاصل بازو فراخوانی میشود. این یک مثال ابتدایی است و در یک سیستم کنترل ربات واقعی، پیچیدگیهای بیشتری وجود خواهد داشت.
همچنین بخوانید: کاتلین چیست؟
جامع ترین دوره آموزش کاتلین پروژه محور | آموزش Kotlin از مبتدی تا پیشرفته
۵. زبان برنامه نویسی رباتیک: سی شارپ با دات نت C# (.NET)

زبان C# (.NET) یک زبان برنامهنویسی چندمنظوره، شیءگرا و مدرن است که توسط شرکت مایکروسافت توسعه یافته و بر پایه چارچوب .NET اجرا میشود.
دوره جامع آموزش زبان برنامه نویسی سی شارپ #C، آموزش سی شارپ پروژه محور
ویژگیها:
- شیءگرا (Object-Oriented): سی شارپ از مفاهیم کلاسها، اشیاء، وراثت، چندشکلی و کپسولهسازی پشتیبانی میکند.
- دارای مدیریت حافظه خودکار (Garbage Collection): نیازی به مدیریت دستی حافظه نیست و سیستم به طور خودکار حافظه استفاده نشده را آزاد میکند.
- سازگاری با چارچوب .NET: دسترسی به کتابخانهها و ابزارهای گستردهای برای توسعه انواع برنامهها، از جمله برنامههای دسکتاپ (WPF)، وب (ASP.NET)، بازی (Unity) و غیره. » آموزش دات نت کور
- IDE قدرتمند (Visual Studio): یک محیط توسعه یکپارچه با امکانات پیشرفته برای کدنویسی، اشکالزدایی و تست.
- پشتیبانی از LINQ (Language Integrated Query): امکان کار با دادهها به صورت یکپارچه در داخل زبان.
کاربردها در رباتیک:
- توسعه رابطهای کاربری (UI): ایجاد رابطهای گرافیکی کاربرپسند برای کنترل و نظارت بر رباتها.
- برنامهنویسی در محیط Microsoft Robotics Developer Studio (MRDS): یک پلتفرم شبیهسازی و برنامه نویسی رباتیک مبتنی بر ویندوز. (البته MRDS دیگر فعالانه توسعه داده نمیشود، اما هنوز در برخی سیستمهای قدیمی استفاده میشود.)
- توسعه برنامههای کاربردی رباتیک: ایجاد برنامههایی که با رباتها تعامل دارند، دادهها را پردازش میکنند و وظایف خاصی را انجام میدهند.
- یکپارچهسازی با سایر سیستمهای مبتنی بر ویندوز: ارتباط با پایگاههای داده، سرویسهای وب و سایر برنامههای ویندوزی.
مزایا در رباتیک:
- سهولت توسعه رابط کاربری: چارچوب WPF در .NET امکان ایجاد رابطهای کاربری جذاب و کاربردی را فراهم میکند.
- یکپارچگی با محیطهای مایکروسافت: برای کاربرانی که از سیستمعامل ویندوز و ابزارهای مایکروسافت استفاده میکنند، یکپارچگی خوبی ارائه میدهد.
- ابزارهای توسعه قوی: Visual Studio با امکانات اشکالزدایی، پروفایلینگ و مدیریت پروژه، فرآیند توسعه را تسهیل میکند.
- مدیریت حافظه آسان: Garbage Collection از بروز بسیاری از خطاهای مربوط به مدیریت حافظه جلوگیری میکند.
مثال ساده (حرکت یک ربات فرضی در یک محیط شبیهسازی شده):
فرض کنید یک کلاس Robot داریم که متدهایی برای حرکت دارد. یک مثال ساده از نحوه استفاده از آن میتواند به شکل زیر باشد:
C#
using System;
public class Robot
{
public string Name { get; set; }
public int X { get; set; }
public int Y { get; set; }
public Robot(string name)
{
Name = name;
X = ۰;
Y = ۰;
}
public void MoveForward(int steps)
{
Y += steps;
Console.WriteLine($"{Name} به جلو {steps} واحد حرکت کرد. موقعیت فعلی: ({X}, {Y})");
}
public void TurnRight()
{
Console.WriteLine($"{Name} به سمت راست چرخید.");
// منطق چرخش میتواند پیچیدهتر باشد
}
}
public class Example
{
public static void Main(string[] args)
{
Robot myRobot = new Robot("Robbie");
myRobot.MoveForward(۵);
myRobot.TurnRight();
myRobot.MoveForward(۳);
}
}
در این مثال، یک کلاس Robot با ویژگیهای نام، مختصات X و Y و متدهایی برای حرکت تعریف شده است. در متد Main یک شیء از کلاس Robot ایجاد شده و متدهای آن برای انجام حرکات فراخوانی میشوند. این یک مثال بسیار ساده است و در یک شبیهسازی واقعی رباتیک، جزئیات بسیار بیشتری درگیر خواهد بود.
۶. زبان برنامه نویسی رباتیک: متلب (MATLAB)

بسیار عالی، زبان MATLAB یک محیط محاسباتی و زبان برنامهنویسی سطح بالاست که برای محاسبات عددی، تحلیل دادهها، شبیهسازی و توسعه الگوریتمها به طور گسترده استفاده میشود.
ویژگیها:
- محیط یکپارچه: شامل ویرایشگر کد، پنجره فرمان، فضای کاری و ابزارهای گرافیکی برای تجسم دادهها.
- عملیات ماتریسی قوی: طراحی شده برای کارآمدی بالا در انجام محاسبات ماتریسی و برداری.
- جعبه ابزارهای تخصصی: مجموعههای گستردهای از توابع و ابزارها برای زمینههای مختلف از جمله رباتیک، کنترل، بینایی ماشین، پردازش سیگنال و غیره.
- تجسم دادهها: قابلیتهای قوی برای رسم نمودارها و تجسم دادههای دو بعدی و سه بعدی.
- زبان تفسیری: دستورات به صورت خط به خط اجرا میشوند، که برای توسعه و آزمایش سریع مناسب است.
کاربردها در رباتیک:
- شبیهسازی ربات: مدلسازی و شبیهسازی رفتار دینامیکی و سینماتیکی رباتها.
- طراحی و تحلیل سیستمهای کنترل: توسعه و ارزیابی الگوریتمهای کنترلی برای رباتها.
- پردازش دادههای حسگر: تحلیل و فیلتر کردن دادههای جمعآوری شده از حسگرهای مختلف ربات.
- بینایی ماشین: توسعه الگوریتمهای پردازش تصویر برای تشخیص اشیاء، مسیریابی بصری و غیره.
- برنامهریزی مسیر: پیادهسازی و آزمایش الگوریتمهای برنامهریزی حرکت ربات.
مزایا در رباتیک:
- ابزارهای تخصصی: وجود جعبه ابزار رباتیک (Robotics System Toolbox) که توابع و مدلهای آماده برای کار با رباتها ارائه میدهد.
- سهولت در مدلسازی و شبیهسازی: امکان ایجاد مدلهای پیچیده ربات و شبیهسازی رفتار آنها بدون نیاز به کدنویسی سطح پایین.
- تجسم آسان نتایج: قابلیتهای گرافیکی قوی برای نمایش نتایج شبیهسازیها و تحلیل دادهها.
- توسعه سریع الگوریتم: زبان تفسیری و جعبه ابزارهای آماده به توسعه و آزمایش سریع الگوریتمها کمک میکنند.
مثال ساده (محاسبه موقعیت نهایی یک بازوی ربات دو مفصلی):
فرض کنید یک بازوی ربات دو مفصلی با طول لینکهای و و زوایای مفاصل و داریم. میخواهیم موقعیت نهایی (x, y) اند-افکتور را محاسبه کنیم:
Matlab
% طول لینک ها
L1 = ۱;
L2 = ۰.۸;
% زوایای مفاصل (به رادیان)
theta1 = pi/۴;
theta2 = pi/۳;
% محاسبه موقعیت نهایی
x = L1*cos(theta1) + L2*cos(theta1 + theta2);
y = L1*sin(theta1) + L2*sin(theta1 + theta2);
% نمایش نتیجه
disp(['موقعیت نهایی (x, y): (', num2str(x), ', ', num2str(y), ')']);
در این مثال ساده، از توابع مثلثاتی cos و sin و عملیات جمع و ضرب برای محاسبه موقعیت نهایی بازوی ربات استفاده شده است. disp برای نمایش نتیجه به کاربر به کار میرود.
۷. زبانهای مخصوص رباتهای صنعتی
زبان برنامه نویسی ABB RAPID
ABB RAPID زبان برنامهنویسی اختصاصی شرکت ABB برای کنترل رباتهای صنعتی آنها است که به منظور برنامهریزی حرکات دقیق، مدیریت وظایف و تعامل با تجهیزات جانبی در محیطهای صنعتی طراحی شده است.
ویژگیها:
- اختصاصی ABB: فقط برای رباتهای صنعتی ABB قابل استفاده است.
- ساختار ماژولار: برنامهها به صورت ماژولهایی سازماندهی میشوند که شامل رویهها (Procedures)، توابع (Functions) و تلهها (Traps) برای مدیریت خطاها و وقفه ها هستند.
- انواع دادههای رباتیک: شامل انواع دادههای خاص برای موقعیتها (robtarget)، ابزارها (tool data)، اشیاء کاری (workobject) و غیره.
- دستورات حرکتی پیشرفته: دستوراتی برای انواع مختلف حرکات ربات مانند حرکات مفصلی (MoveJ)، حرکات خطی (MoveL)، حرکات دایرهای (MoveC) و غیره.
- مدیریت I/O: دستوراتی برای خواندن و نوشتن سیگنالهای ورودی و خروجی دیجیتال و آنالوگ.
- قابلیتهای چندوظیفگی (Multitasking): امکان اجرای چندین وظیفه به صورت همزمان.
کاربردها در رباتیک:
- برنامهریزی حرکات رباتهای صنعتی ABB: ایجاد برنامههایی برای انجام وظایفی مانند جوشکاری، رنگآمیزی، مونتاژ، جابجایی مواد و غیره.
- کنترل دقیق فرآیندهای صنعتی: هماهنگی حرکت ربات با سایر تجهیزات و ماشینآلات در خط تولید.
- مدیریت ایمنی ربات: تعریف مناطق کاری ایمن و واکنش به رویدادهای ایمنی.
- تعامل با حسگرها و عملگرهای خاص: کنترل ابزارهای خاص متصل به ربات و دریافت داده از حسگرهای صنعتی.
مزایا در رباتیک:
- بهینهسازی شده برای رباتهای ABB: دستورات و ساختارهای زبان به طور خاص برای کنترل دقیق و کارآمد رباتهای ABB طراحی شدهاند.
- ادغام قوی با سختافزار و نرمافزار ABB: سازگاری کامل با کنترلرها، نرمافزار شبیهسازی RobotStudio و سایر محصولات ABB.
- قابلیتهای پیشرفته برای کاربردهای صنعتی: دستورات و ویژگیهای خاص برای انجام وظایف پیچیده در محیطهای تولیدی.
- پشتیبانی و آموزش تخصصی: دسترسی به مستندات، آموزشها و پشتیبانی فنی ارائه شده توسط ABB.
مثال ساده (حرکت ربات به یک نقطه تعریف شده):
MODULE MainModule
PROC main()
! تعریف یک موقعیت به نام target_position
CONST robtarget target_position := [[100, 200, 300],[0, 1, 0, 0],[0, 0, 0, 0],[9E+09, 9E+09, 9E+09, 9E+09, 9E+09, 9E+09]];
! حرکت خطی به موقعیت تعریف شده با سرعت v50 و منطقه دقیق z10
MoveL target_position, v50, z10, tool0;
ENDPROC
ENDMODULE
در این مثال ساده، یک ماژول به نام MainModule و یک رویه به نام main تعریف شده است. یک متغیر ثابت از نوع robtarget به نام target_position برای ذخیره موقعیت هدف ایجاد شده است. سپس از دستور MoveL برای حرکت خطی ربات به این موقعیت با سرعت و دقت مشخص استفاده شده است. tool0 به فریم ابزار پیشفرض ربات اشاره دارد.
- بسیاری از تولیدکنندگان بزرگ رباتهای صنعتی، زبانهای برنامهنویسی خاص خود را توسعه دادهاند. این زبانها معمولاً برای برنامهریزی حرکات دقیق، کنترل عملگرها و هماهنگی با تجهیزات جانبی در محیطهای صنعتی طراحی شدهاند. مثالهایی از این زبانها عبارتند از:
دوره جامع آموزش طراحی رابط کاربری (UI) و تجربه کاربری (UX) در اندروید
زبان برنامه نویسی KUKA KRL
KUKA KRL (KUKA Robot Language) یک زبان برنامهنویسی اختصاصی است که توسط شرکت KUKA برای کنترل رباتهای صنعتی خود توسعه داده شده است. این زبان ساختاری شبیه به زبان پاسکال دارد و برای برنامهریزی حرکات، توالی وظایف و تعامل با اجزای مختلف سیستم رباتیک KUKA به کار میرود.
ویژگیها:
- اختصاصی KUKA: منحصراً برای کنترل رباتهای صنعتی KUKA طراحی شده است.
- ساختار دستوری شبیه پاسکال: برای برنامهنویسانی که با پاسکال آشنایی دارند، یادگیری آن نسبتاً آسانتر است.
- انواع دادههای خاص رباتیک: شامل انواع دادههایی برای موقعیتها (POS، E6POS)، محورها (AXIS)، فریمها (FRAME) و غیره که مختص برنامهنویسی حرکات ربات هستند.
- دستورات حرکتی متنوع: دستوراتی برای حرکت نقطهبهنقطه (PTP)، حرکت خطی (LIN)، حرکت دایرهای (CIRC)، و حرکات پیشرفتهتر مانند Spline.
- مدیریت ورودی/خروجی (I/O): امکان خواندن وضعیت حسگرها و کنترل عملگرهای متصل به سیستم رباتیک.
- قابلیت تعریف توابع و رویهها: سازماندهی کد به صورت بلوکهای قابل استفاده مجدد.
- متغیرهای سیستمی: دسترسی به اطلاعات مربوط به وضعیت ربات، سرعت، موقعیت و غیره از طریق متغیرهای سیستمی.
کاربردها در رباتیک:
- برنامهریزی حرکات رباتهای KUKA: ایجاد برنامههایی برای انجام وظایفی نظیر جوشکاری، مونتاژ، جابجایی مواد، ماشینکاری و غیره.
- کنترل فرآیندهای اتوماسیون صنعتی: هماهنگی ربات با سایر ماشینآلات و تجهیزات در خط تولید.
- پیادهسازی منطق کنترلی: تعریف توالی عملیات، تصمیمگیری بر اساس ورودی حسگرها و مدیریت خطاها.
- تعامل با ابزارهای خاص: کنترل ابزارهای متصل به فلنج ربات مانند ابزارهای جوش، چنگکها و غیره.
مزایا در رباتیک:
- بهینهسازی شده برای رباتهای KUKA: دستورات و ساختار زبان به طور خاص برای استفاده با سختافزار و نرمافزار KUKA طراحی شدهاند.
- کنترل دقیق حرکت: امکان برنامهریزی حرکات پیچیده و دقیق با استفاده از انواع دستورات حرکتی.
- دسترسی به قابلیتهای خاص ربات: بهرهگیری از ویژگیهای منحصربهفرد رباتهای KUKA از طریق دستورات خاص زبان.
- ادغام با محیط توسعه KUKA WorkVisual: یکپارچگی با ابزارهای شبیهسازی، پیکربندی و برنامهنویسی آفلاین KUKA.
مثال ساده (حرکت ربات به یک موقعیت و بازگشت به خانه):
&ACCESS RVO
&REL 1
DEF SIMPLE_MOVE()
; تعریف یک موقعیت به نام TARGET_POS
DECL E6POS TARGET_POS
TARGET_POS={X 100,Y 200,Z 300,A 0,B 0,C 0,S 6,T 21,E1 0,E2 0,E3 0,E4 0,E5 0,E6 0}
; حرکت نقطهبهنقطه به موقعیت هدف با سرعت ۵۰%
PTP TARGET_POS C_VEL
; حرکت خطی به موقعیت خانه با سرعت ۱۰۰%
LIN HOME WITH $VEL_CP=100
END
در این مثال ساده، یک رویه به نام SIMPLE_MOVE تعریف شده است. یک متغیر از نوع E6POS برای ذخیره موقعیت هدف ایجاد شده است. سپس از دستور PTP برای حرکت نقطهبهنقطه به موقعیت هدف و از دستور LIN برای حرکت خطی به موقعیت خانه استفاده شده است. C_VEL و $VEL_CP برای تنظیم سرعت حرکت به کار میروند. HOME یک موقعیت از پیش تعریف شده در سیستم ربات است.
زبان برنامه نویسی Universal Robots URScript
Universal Robots URScript زبان برنامهنویسی اختصاصی رباتهای همکار (Cobot) شرکت Universal Robots است که به منظور ایجاد برنامههای حرکتی، کنترل منطق و تعامل با محیط به روشی نسبتاً ساده و کاربرپسند طراحی شده است.
ویژگیها:
- اختصاصی Universal Robots: فقط برای برنامهنویسی رباتهای UR قابل استفاده است.
- سینتکس شبیه پایتون: ساختاری خوانا و نسبتاً آسان برای یادگیری دارد که شباهتهایی به زبان پایتون نشان میدهد.
- انواع دادههای رباتیک: شامل انواع دادههایی برای موقعیتها (pose)، فریمها (frame)، ابزارها (tool)، و غیره.
- دستورات حرکتی بصری: دستوراتی برای حرکت نقطهبهنقطه (movej)، حرکت خطی (movel)، حرکت دایرهای (movec) و غیره که به صورت پارامتری تنظیم میشوند.
- کنترل I/O: دستوراتی برای مدیریت ورودی و خروجیهای دیجیتال و آنالوگ ربات.
- قابلیتهای پیشرفته: پشتیبانی از توابع (def)، حلقهها (while، for)، عبارات شرطی (if-else) و نخها (thread).
- ادغام با PolyScope: رابط کاربری گرافیکی ربات (PolyScope) در پسزمینه کدهای URScript تولید میکند و امکان ویرایش مستقیم اسکریپتها نیز وجود دارد.
کاربردها در رباتیک:
- برنامهریزی حرکات رباتهای UR: ایجاد برنامههایی برای انجام وظایفی مانند برداشتن و گذاشتن قطعات (pick and place)، مونتاژ، بستهبندی، ماشینکاری و غیره.
- کنترل فرآیندهای همکاری انسان و ربات: به دلیل ایمنی ذاتی رباتهای همکار UR، برنامهنویسی برای تعامل نزدیک با انسانها.
- یکپارچهسازی با تجهیزات جانبی: کنترل گریپرها، نوار نقالهها، حسگرها و سایر دستگاههای متصل به ربات.
- ایجاد رابطهای کاربری سفارشی: از طریق اسکریپت میتوان منطق و رفتار رابط کاربری را سفارشیسازی کرد.
مزایا در رباتیک:
- یادگیری نسبتاً آسان: سینتکس ساده و مستندات خوب، فرآیند یادگیری را تسهیل میکند.
- ادغام قوی با سختافزار و نرمافزار UR: سازگاری کامل با رباتها و رابط کاربری PolyScope.
- تمرکز بر کاربردهای همکارانه: دستورات و ویژگیهای زبان برای کار در محیطهای مشترک انسان و ربات بهینه شدهاند.
- توسعه سریع برنامههای ساده تا متوسط: برای بسیاری از کاربردهای رایج صنعتی، توسعه برنامهها به سرعت امکانپذیر است.
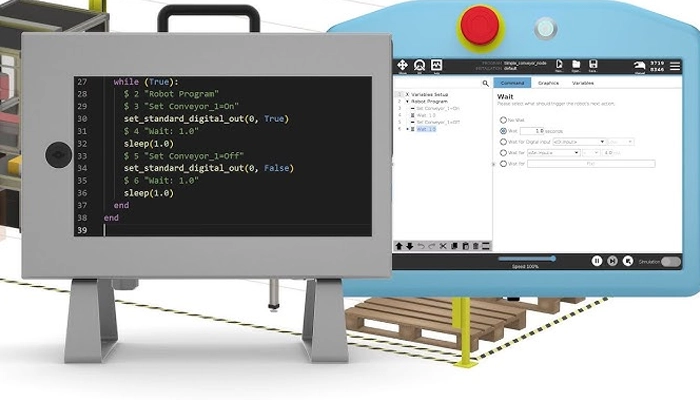
مثال ساده (حرکت ربات به یک نقطه و فعال کردن گریپر):
# تعریف یک موقعیت به نام target_pose
target_pose = p[0.3, -0.2, 0.5, 0, 0, 0]
# تعریف سرعت و شتاب حرکت
speed = 0.5
acceleration = 1.2
# حرکت خطی به موقعیت هدف
movel(target_pose, a=acceleration, v=speed)
# فعال کردن خروجی دیجیتال شماره ۰ (فرض بر این است که گریپر به این خروجی متصل است)
set_digital_out(0, True)
# صبر کردن برای ۲ ثانیه
sleep(2)
# حرکت خطی به موقعیت اولیه (home)
movej(get_actual_tcp(), a=acceleration, v=speed)
# غیرفعال کردن خروجی دیجیتال شماره ۰
set_digital_out(0, False)
در این مثال ساده، ابتدا یک موقعیت هدف تعریف شده است. سپس ربات با حرکت خطی به آن موقعیت میرود، یک خروجی دیجیتال فعال میشود (برای کنترل گریپر)، کمی صبر میکند و در نهایت به موقعیت فعلی خود بازمیگردد و خروجی دیجیتال را غیرفعال میکند. p[...] برای تعریف یک “pose” (موقعیت و جهتگیری) استفاده میشود. movel دستور حرکت خطی و movej دستور حرکت مفصلی است. set_digital_out برای کنترل خروجیهای دیجیتال و sleep برای ایجاد تاخیر استفاده میشوند. get_actual_tcp() موقعیت فعلی ابزار (TCP) ربات را برمیگرداند.
زبان برنامه نویسی Yaskawa INFORM
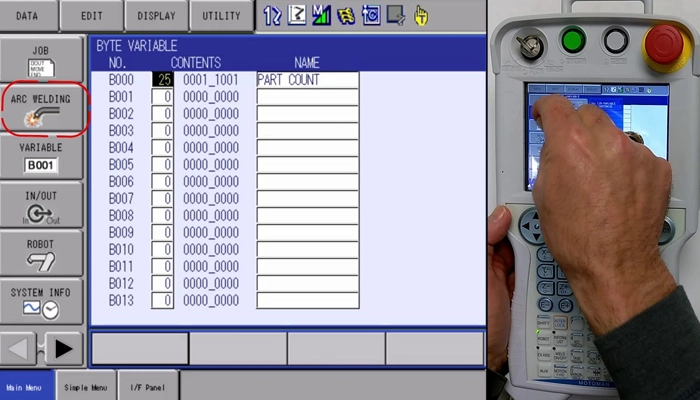
Yaskawa INFORM زبان برنامهنویسی اختصاصی برای رباتهای صنعتی Yaskawa Motoman است که به منظور کنترل دقیق حرکات، هماهنگی با تجهیزات و اجرای وظایف اتوماسیون در محیطهای صنعتی طراحی شده است.
ویژگیها:
- اختصاصی Yaskawa: فقط برای برنامهنویسی رباتهای Yaskawa Motoman قابل استفاده است.
- ساختار دستوری مبتنی بر فرمان: برنامهها با نوشتن دستوراتی ایجاد میشوند که حرکات و اقدامات ربات را تعریف میکنند.
- انواع دادههای رباتیک: شامل انواع دادههای خاص برای موقعیتها (P)، ابزارها (TOOL)، فریمهای کاربر (UFRAME) و غیره.
- دستورات حرکتی متنوع: دستوراتی برای حرکت مفصلی (MOVJ)، حرکت خطی (MOVL)، حرکت دایرهای (MOVC) و حرکات اسپلاین.
- کنترل ورودی/خروجی (I/O): دستوراتی برای خواندن وضعیت سنسورها و کنترل عملگرهای متصل به ربات.
- ساختارهای کنترلی: پشتیبانی از دستورات شرطی (IF-THEN-ELSE)، حلقهها (FOR، WHILE) و زیرروالها (CALL).
- متغیرهای سراسری و محلی: امکان تعریف و استفاده از متغیرها در سطوح مختلف برنامه.
کاربردها در رباتیک:
- برنامهریزی حرکات رباتهای Yaskawa: ایجاد برنامههایی برای انجام وظایفی مانند جوشکاری، مونتاژ، جابجایی مواد، بستهبندی، رنگآمیزی و ماشینکاری.
- کنترل خطوط تولید اتوماتیک: هماهنگی حرکت ربات با سایر دستگاهها و تجهیزات در فرآیندهای تولیدی.
- پیادهسازی منطق کنترلی پیچیده: تعریف توالی عملیات، تصمیمگیری بر اساس دادههای حسگر و مدیریت خطاها در سیستم رباتیک.
- تعامل با ابزارهای خاص: کنترل ابزارهای نهایی متصل به ربات و پیکربندی پارامترهای آنها.
مزایا در رباتیک:
- بهینهسازی شده برای رباتهای Yaskawa: دستورات و ساختار زبان به طور خاص برای کنترل دقیق و کارآمد رباتهای Motoman طراحی شدهاند.
- دسترسی به قابلیتهای پیشرفته ربات: امکان بهرهگیری از تمام ویژگیها و عملکردهای رباتهای Yaskawa از طریق دستورات خاص زبان.
- ادغام با محیط توسعه Yaskawa: سازگاری کامل با نرمافزارهای شبیهسازی (MotoSim EG-VRC) و ابزارهای برنامهنویسی آفلاین Yaskawa.
- کنترل دقیق حرکت و زمانبندی: امکان برنامهریزی حرکات پیچیده با دقت بالا و کنترل زمانبندی رویدادها.
مثال ساده (حرکت ربات به یک موقعیت تعریف شده):
/JOB
//JOB NAME SIMPLE_MOVE
//==================================================
///DATE 2025/05/14
///TIME 18:28
///COMMENT SIMPLE MOVE EXAMPLE
//POSITION DATA
P1 = (100.00, 200.00, 300.00, 0.00, 0.00, 0.00);
//TOOL DATA
TOOL 1 = (0.00, 0.00, 0.00, 0.00, 0.00, 0.00);
//MAIN PROCEDURE
BEGIN
//MOVE TO P1 WITH JOINT INTERPOLATION AT 50% SPEED
MOVJ P1 V=50.0;
END
/END
در این مثال ساده، یک Job به نام SIMPLE_MOVE تعریف شده است. دادههای موقعیت P1 با مختصات X، Y، Z و زوایای چرخشی تعریف شدهاند. ابزار پیشفرض (TOOL 1) نیز تعریف شده است. در بخش BEGIN و END، دستور MOVJ برای حرکت مفصلی ربات به موقعیت P1 با سرعت ۵۰% استفاده شده است.
۸. زبانهای برنامهنویسی بصری (Visual Programming Languages):
- برای مبتدیان و در محیطهای آموزشی، زبانهای برنامهنویسی بصری مانند Scratch میتوانند ابزاری عالی برای آشنایی با مفاهیم پایه برنامهنویسی رباتیک باشند. در این زبانها، برنامهها با کشیدن و اتصال بلوکهای کد ایجاد میشوند.
۹. زبانهای توصیف سختافزار (Hardware Description Languages – HDLs):
برای توسعه و برنامهریزی مدارهای الکترونیکی مورد استفاده در رباتها، زبانهایی مانند Verilog و VHDL کاربرد دارند. این زبانها به مهندسان الکترونیک امکان میدهند تا رفتار مدارهای دیجیتال را به صورت متن توصیف کنند.
ابزارها و محیطهای توسعه برای برنامهنویسی رباتیک
ابزارها و محیطهای توسعه نقش حیاتی در فرآیند برنامهنویسی رباتیک ایفا میکنند و به توسعهدهندگان کمک میکنند تا کد بنویسند، آن را اشکالزدایی کنند، رباتها را شبیهسازی کنند و با سختافزار آنها تعامل داشته باشند. در اینجا به برخی از مهمترین ابزارها و محیطهای توسعه در این حوزه اشاره میکنیم:
۱. سیستم عامل ربات (ROS – Robot Operating System):
- توضیح: یک چارچوب نرمافزاری متنباز و انعطافپذیر برای ساخت نرمافزارهای رباتیک. ROS مجموعهای از ابزارها، کتابخانهها و قراردادها را فراهم میکند که به توسعهدهندگان کمک میکند تا سیستمهای رباتیک پیچیده را به صورت ماژولار و قابل استفاده مجدد ایجاد کنند.
- ویژگیها:
- معماری مبتنی بر گره (Node) و پیام (Message).
- ابزارهایی برای ارتباط بین فرآیندها، مدیریت سختافزار، تجسم دادهها (RViz)، شبیهسازی (Gazebo) و غیره.
- پشتیبانی از زبانهای برنامهنویسی مختلف، به ویژه Python و C++.
- جامعه کاربری بزرگ و بستههای نرمافزاری فراوان برای کاربردهای مختلف رباتیک.
۲. محیطهای توسعه یکپارچه (IDEs):
- Visual Studio (برای C#, C++): یک IDE قدرتمند با امکانات پیشرفته برای کدنویسی، اشکالزدایی، تست و مدیریت پروژه. برای توسعه در محیطهای ویندوزی و با استفاده از .NET بسیار مناسب است.
- VS Code (چندزبانه): یک ویرایشگر کد سبک و قدرتمند با پشتیبانی گسترده از زبانهای مختلف از طریق افزونهها. برای توسعه با Python، C++ و سایر زبانها در پروژههای رباتیک بسیار محبوب است.
- PyCharm (برای Python): یک IDE اختصاصی برای توسعه با زبان Python با امکانات ویژه برای پروژههای بزرگ، اشکالزدایی پیشرفته و ادغام با ابزارهای علمی و رباتیک.
- MATLAB IDE (برای MATLAB): محیط توسعه اختصاصی MATLAB با ویرایشگر کد، پنجره فرمان، فضای کاری و ابزارهای گرافیکی برای تجسم دادهها و توسعه الگوریتمها.
۳. محیطهای شبیهسازی رباتیک:
- Gazebo: یک شبیهساز رباتیک سه بعدی قدرتمند و متنباز که امکان شبیهسازی دقیق دینامیک، سنسورها و محیطهای پیچیده را فراهم میکند. به طور گسترده با ROS یکپارچه شده است.
- V-REP (CoppeliaSim): یک شبیهساز رباتیک چندمنظوره با رابط کاربری گرافیکی قوی و پشتیبانی از زبانهای برنامهنویسی مختلف (Lua، Python، C++، MATLAB).
- PyBullet: یک موتور فیزیک و شبیهساز رباتیک با پشتیبانی از Python. استفاده از آن نسبتاً آسان است و برای شبیهسازی سریع و آزمایش الگوریتمها مناسب است.
- Webots: یک شبیهساز رباتیک حرفهای با تمرکز بر شبیهسازی واقعگرایانه و پشتیبانی از زبانهای برنامهنویسی مختلف.
- RobotStudio (ABB): نرمافزار شبیهسازی و برنامهنویسی آفلاین اختصاصی برای رباتهای ABB.
- MotoSim EG-VRC (Yaskawa): نرمافزار شبیهسازی و برنامهنویسی آفلاین اختصاصی برای رباتهای Yaskawa Motoman.
- Unity و Unreal Engine: موتورهای بازی قدرتمند که به طور فزایندهای برای شبیهسازی رباتیک، به ویژه در زمینههای بصری و تعامل انسان و ربات، استفاده میشوند.
۴. ابزارهای ارتباط با سختافزار:
- Serial Communication Tools: ابزارهایی مانند
minicom(در لینوکس) یا نرمافزارهای رابط سریال در ویندوز برای برقراری ارتباط با میکروکنترلرها و سایر دستگاههای سختافزاری از طریق پورت سریال. - SSH Clients: ابزارهایی مانند
PuTTY(در ویندوز) یا ترمینال (در لینوکس و macOS) برای دسترسی از راه دور به سیستمهای رباتیک. - Network Tools: ابزارهایی برای پیکربندی و نظارت بر شبکههای مورد استفاده در سیستمهای رباتیک.
- Specific Hardware SDKs: کیتهای توسعه نرمافزاری ارائه شده توسط تولیدکنندگان سختافزار (مانند سنسورها، درایورهای موتور) که امکان تعامل با دستگاههای آنها را فراهم میکنند.
۵. ابزارهای تجسم و نظارت:
- RViz (ROS Visualizer): یک ابزار سه بعدی برای تجسم دادههای حسگر، مدلهای ربات، نقشهها و برنامههای حرکتی در ROS.
- Plotting Tools (matplotlib, gnuplot): کتابخانهها و ابزارهایی برای رسم نمودارها و تجسم دادههای جمعآوری شده از ربات.
- Data Logging Tools: ابزارهایی برای ثبت و ذخیره دادههای حسگر و وضعیت ربات برای تجزیه و تحلیل بعدی.
۶. ابزارهای برنامهنویسی اختصاصی رباتهای صنعتی:
- Teach Pendants: دستگاههای دستی که اپراتورها از آنها برای برنامهریزی و کنترل مستقیم رباتهای صنعتی استفاده میکنند. این دستگاهها معمولاً دارای رابط کاربری گرافیکی و دکمههایی برای حرکت دادن ربات و وارد کردن دستورات هستند.
- Offline Programming Software (مانند RobotStudio، MotoSim EG-VRC): نرمافزارهایی که به برنامهنویسان اجازه میدهند تا برنامههای ربات را به صورت آفلاین و بدون نیاز به توقف خط تولید ایجاد و شبیهسازی کنند.
انتخاب ابزارها و محیطهای توسعه مناسب بستگی به نوع پروژه رباتیک، زبانهای برنامهنویسی مورد استفاده، سختافزار ربات و ترجیحات توسعهدهنده دارد. ROS به عنوان یک چارچوب جامع، بسیاری از این ابزارها را به صورت یکپارچه ارائه میدهد و یک انتخاب محبوب برای پروژههای رباتیک پیشرفته است. برای رباتهای صنعتی خاص، استفاده از ابزارها و نرمافزارهای ارائه شده توسط سازنده ربات اغلب ضروری است.
کاربردهای برنامهنویسی رباتیک در صنایع مختلف
برنامهنویسی رباتیک نقش بسیار مهمی در صنایع مختلف ایفا میکند و به اتوماسیون فرآیندها، افزایش کارایی، بهبود کیفیت و ایمنی کمک میکند. در زیر به برخی از کاربردهای کلیدی آن در صنایع مختلف اشاره میکنیم:
۱. صنعت خودروسازی:
- جوشکاری: رباتها با دقت و سرعت بالا قطعات خودرو را جوش میدهند.
- رنگآمیزی: رباتها میتوانند رنگآمیزی یکنواخت و با کیفیت بالا را انجام دهند.
- مونتاژ: رباتها قطعات مختلف خودرو را با دقت و سرعت مونتاژ میکنند.
- جابجایی مواد: رباتها قطعات سنگین و حجیم را در خط تولید جابجا میکنند.
- بازرسی کیفیت: رباتهای مجهز به سیستمهای بینایی ماشین، کیفیت قطعات و محصولات نهایی را بررسی میکنند.
۲. صنعت الکترونیک:
- مونتاژ قطعات: رباتها قطعات کوچک و حساس الکترونیکی را روی بردهای مدار چاپی (PCB) با دقت بالا مونتاژ میکنند.
- بازرسی و تست: رباتها کیفیت مونتاژ و عملکرد محصولات الکترونیکی را تست میکنند.
- بستهبندی: رباتها محصولات نهایی را بستهبندی میکنند.
- جابجایی مواد: رباتها مواد اولیه و قطعات را در خط تولید جابجا میکنند.
۳. صنعت مواد غذایی و نوشیدنی:
- بستهبندی: رباتها مواد غذایی و نوشیدنیها را با سرعت و بهداشت بالا بستهبندی میکنند.
- جابجایی و چیدن: رباتها محصولات را جابجا کرده و روی پالتها میچینند.
- برداشت و مرتبسازی: رباتهای مجهز به سیستمهای بینایی ماشین، محصولات را برداشت و بر اساس کیفیت یا اندازه مرتب میکنند.
- آمادهسازی مواد اولیه: در برخی موارد، رباتها در فرآیندهای آمادهسازی مواد اولیه مانند برش و مخلوط کردن نیز استفاده میشوند.
۴. صنعت داروسازی و پزشکی:
- مونتاژ دستگاههای پزشکی: رباتها قطعات کوچک و دقیق دستگاههای پزشکی را مونتاژ میکنند.
- بستهبندی داروها: رباتها داروها را با رعایت استانداردهای بهداشتی بستهبندی میکنند.
- جراحیهای رباتیک: رباتها با هدایت جراحان، عملهای پیچیده را با دقت بالا انجام میدهند.
- توانبخشی: رباتها در دستگاههای توانبخشی برای کمک به بیماران در بازیابی حرکات استفاده میشوند.
۵. صنعت فلزکاری و ماشینکاری:
- جوشکاری: مشابه صنعت خودروسازی، رباتها در جوشکاری قطعات فلزی کاربرد دارند.
- برشکاری و فرزکاری: رباتهای مجهز به ابزارهای برش و فرز، قطعات فلزی را با دقت بالا شکل میدهند.
- پرداختکاری: رباتها سطوح فلزی را پرداخت و تمیز میکنند.
- بارگیری و تخلیه ماشینآلات: رباتها قطعات را در ماشینآلات CNC قرار داده و پس از پردازش خارج میکنند.
۶. صنعت لجستیک و انبارداری:
- جابجایی و مرتبسازی کالا: رباتهای متحرک و بازوهای رباتیک کالاها را در انبارها جابجا و مرتب میکنند.
- چیدن سفارشات: رباتها میتوانند سفارشات مشتریان را از قفسهها جمعآوری کنند.
- بستهبندی و ارسال: رباتها در فرآیندهای بستهبندی و آمادهسازی کالا برای ارسال نقش دارند.
۷. صنعت کشاورزی:
- برداشت محصول: رباتهای کشاورزی میتوانند محصولات را به صورت خودکار برداشت کنند.
- کاشت بذر و نشاء: رباتها با دقت بالا بذرها را کاشته و نشاءها را منتقل میکنند.
- سمپاشی و کوددهی: رباتها میتوانند مزارع را به صورت هوشمند سمپاشی و کوددهی کنند.
- نظارت بر محصولات: رباتهای پرنده (پهپادها) میتوانند وضعیت مزارع و محصولات را نظارت کنند.
اینها تنها چند نمونه از کاربردهای گسترده برنامهنویسی رباتیک در صنایع مختلف هستند. با پیشرفت فناوری، انتظار میرود که نقش رباتها و نیاز به برنامهنویسی آنها در صنایع گوناگون به طور چشمگیری افزایش یابد.
چالشهای برنامه نویسی رباتیک
برنامهنویسی رباتیک، با وجود پیشرفتهای چشمگیر، هنوز با چالشهای متعددی روبرو است و آیندهای پر از پتانسیل و تحولات هیجانانگیز دارد. در زیر به برخی از مهمترین چالشها و چشماندازهای آینده این حوزه میپردازیم:
چالشهای برنامهنویسی رباتیک:
-
پیچیدگی محیطهای غیرساختاریافته: رباتها اغلب باید در محیطهایی پویا و غیرقابل پیشبینی عمل کنند که نیازمند الگوریتمهای پیچیده برای ادراک، برنامهریزی و واکنش مناسب است. برنامهنویسی برای این سناریوها بسیار دشوارتر از محیطهای ساختاریافته صنعتی است.
-
تعامل انسان و ربات (Human-Robot Interaction – HRI): ایجاد رباتهایی که بتوانند به طور ایمن، مؤثر و طبیعی با انسانها تعامل کنند، چالشهای قابل توجهی در زمینه برنامهنویسی رابطهای کاربری، درک نیات انسان و همکاری در وظایف دارد.
-
قابلیت اطمینان و ایمنی: برنامهنویسی سیستمهای رباتیک که بتوانند به طور مداوم و بدون خطا عمل کنند، به ویژه در کاربردهای حیاتی مانند پزشکی یا خودروهای خودران، از اهمیت بالایی برخوردار است و نیازمند رویکردهای دقیق در طراحی و تست نرمافزار است.
-
یادگیری و سازگاری: آموزش رباتها برای یادگیری وظایف جدید، سازگاری با تغییرات محیط و بهبود عملکرد در طول زمان همچنان یک چالش فعال در زمینه هوش مصنوعی و برنامهنویسی رباتیک است.
-
یکپارچهسازی حسگرها و عملگرهای متنوع: رباتها از طیف گستردهای از حسگرها و عملگرها استفاده میکنند که هر کدام دارای رابطها و پروتکلهای ارتباطی خاص خود هستند. برنامهنویسی برای یکپارچهسازی و هماهنگی عملکرد این اجزا میتواند پیچیده باشد.
-
برنامهنویسی بلادرنگ (Real-time Programming): بسیاری از کاربردهای رباتیک نیازمند پاسخهای سریع و دقیق به رویدادها در زمان واقعی هستند. برنامهنویسی سیستمهای بلادرنگ با محدودیتهای زمانی سختگیرانه چالشهای خاص خود را دارد.
-
توسعه ابزارهای برنامهنویسی کاربرپسند: در حالی که ابزارهای برنامهنویسی رباتیک پیشرفت کردهاند، هنوز نیاز به ابزارهایی وجود دارد که برای کاربران غیرمتخصص نیز قابل استفاده باشند تا بتوانند رباتها را برای وظایف ساده برنامهریزی کنند.
-
هزینه توسعه و پیچیدگی: توسعه نرمافزارهای رباتیک پیچیده میتواند پرهزینه و زمانبر باشد و نیازمند تخصصهای گوناگون در زمینههای مختلف مهندسی و علوم کامپیوتر است.
آینده برنامه نویسی رباتیک
-
هوش مصنوعی و یادگیری ماشین پیشرفته: انتظار میرود که الگوریتمهای هوش مصنوعی و یادگیری ماشین نقش بسیار پررنگتری در برنامهنویسی رباتیک ایفا کنند و رباتها را قادر سازند تا وظایف پیچیدهتری را با استقلال و انعطافپذیری بیشتری انجام دهند.
-
برنامهنویسی بصری و بدون کد (Visual and No-Code Programming): ابزارهای برنامهنویسی بصری و رابطهای کاربری سادهتر به کاربران غیرمتخصص امکان میدهند تا رباتها را برای وظایف خاص برنامهریزی کنند، که میتواند دسترسی به فناوری رباتیک را گستردهتر کند.
-
همکاری انسان و ربات نزدیکتر و هوشمندتر: با پیشرفت در HRI و هوش مصنوعی، رباتها قادر خواهند بود تا به طور ایمن و مؤثر در کنار انسانها کار کنند، نیات آنها را درک کرده و به طور فعال در انجام وظایف کمک کنند.
-
رباتهای خودمختار و تطبیقپذیر: رباتهایی که قادر به یادگیری از محیط، برنامهریزی مسیر در زمان واقعی و تطبیق رفتار خود با شرایط جدید هستند، در صنایعی مانند لجستیک، کشاورزی و خدمات بسیار کاربردی خواهند بود.
-
توسعه پلتفرمهای نرمافزاری یکپارچه: انتظار میرود که پلتفرمهای نرمافزاری جامعتری برای رباتیک توسعه یابند که ابزارهایی برای شبیهسازی، برنامهنویسی، کنترل و مدیریت ناوگان رباتها را در یک محیط فراهم کنند.
-
استانداردسازی و قابلیت همکاری: تلاشهایی برای استانداردسازی رابطها و پروتکلهای ارتباطی در رباتیک صورت خواهد گرفت که امکان همکاری و استفاده مجدد از نرمافزار و سختافزار بین سیستمهای مختلف را تسهیل میکند.
-
امنیت سایبری در رباتیک: با افزایش اتصال رباتها به شبکهها و استفاده از آنها در کاربردهای حساس، توجه به امنیت سایبری و حفاظت از رباتها در برابر حملات مخرب اهمیت بیشتری پیدا خواهد کرد.
-
اخلاق و مسئولیتپذیری: با گسترش استفاده از رباتهای هوشمند، مسائل اخلاقی مربوط به تصمیمگیریهای رباتها، حریم خصوصی دادهها و مسئولیتپذیری در قبال اقدامات آنها مورد توجه بیشتری قرار خواهد گرفت.
در مجموع، آینده برنامهنویسی رباتیک بسیار پویا و هیجانانگیز به نظر میرسد. حل چالشهای فعلی و بهرهگیری از پیشرفتهای هوش مصنوعی و فناوریهای مرتبط، راه را برای نسل جدیدی از رباتهای هوشمند، انعطافپذیر و همکار هموار خواهد کرد که نقش مهمتری در زندگی روزمره و صنایع مختلف ایفا میکنند.
سوالات متداول پیرامون برنامه نویسی رباتیک
-
آیا برنامهنویسی رباتیک برای کودکان مناسب است؟
بله، برنامهنویسی رباتیک برای کودکان بسیار مفید است. ابزارهایی مانند رباتهای آموزشی ساده (مانند LEGO Mindstorms، Makeblock mBot) و زبانهای برنامهنویسی بصری (مانند Scratch) به کودکان کمک میکنند تا مفاهیم برنامهنویسی، حل مسئله و تفکر منطقی را به روشی جذاب و تعاملی یاد بگیرند.
-
چگونه میتوان برنامهنویسی رباتیک را یاد گرفت؟
راههای مختلفی برای یادگیری برنامهنویسی رباتیک وجود دارد:
-
- دورههای آنلاین: پلتفرمهایی مانند Coursera، edX، Udacity و Udemy دورههای آموزشی متنوعی در زمینه رباتیک و برنامهنویسی ارائه میدهند.
- کتابها و مقالات: منابع آموزشی زیادی برای یادگیری مفاهیم پایه و پیشرفته برنامهنویسی رباتیک در دسترس هستند.
- رباتهای آموزشی: کار کردن با کیتهای رباتیک آموزشی به صورت عملی به درک مفاهیم کمک میکند.
- انجمنها و گروههای آنلاین: عضویت در انجمنهای رباتیک میتواند به تبادل اطلاعات و یادگیری از دیگران کمک کند.
- دورههای حضوری و کارگاهها: شرکت در کلاسها و کارگاههای آموزشی میتواند یک روش ساختارمند برای یادگیری باشد.
-
چه مهارتهایی برای برنامهنویسی رباتیک مورد نیاز است؟
مهارتهای مورد نیاز شامل:
-
- مبانی برنامهنویسی: درک مفاهیم اولیه مانند متغیرها، حلقهها، شرطها و توابع.
- دانش ریاضی و فیزیک: درک مفاهیم مربوط به حرکت، هندسه و نیروها.
- آشنایی با الکترونیک و سختافزار: درک نحوه کارکرد حسگرها و عملگرها.
- حل مسئله و تفکر منطقی: توانایی تجزیه مسائل پیچیده و یافتن راه حلهای الگوریتمی.
- آشنایی با سیستم عامل ربات (ROS) (اختیاری اما مفید برای پروژههای پیشرفته).
- مهارت در زبانهای برنامهنویسی مرتبط.
-
آیا برای برنامهنویسی رباتیک نیاز به دانش خاصی در مورد رباتها دارم؟
آشنایی اولیه با ساختار و عملکرد رباتها (مانند اجزا، انواع حرکت و حسگرها) مفید است. با این حال، میتوانید با استفاده از شبیهسازها و کیتهای آموزشی ساده شروع کنید و به تدریج دانش خود را در مورد رباتها عمیقتر کنید.
-
تفاوت بین برنامهنویسی ربات و برنامهنویسی رباتیک چیست؟
این دو اصطلاح اغلب به جای یکدیگر استفاده میشوند و تفاوت معنایی قابل توجهی ندارند. هر دو به فرآیند نوشتن کد برای کنترل رفتار رباتها اشاره دارند.
-
کلاسهای برنامه نویسی رباتیک برای چه کسانی مناسب است؟
کلاسهای برنامهنویسی رباتیک برای افراد علاقهمند به یادگیری نحوه کنترل و تعامل با رباتها مناسب است. این شامل دانشآموزان، دانشجویان، مهندسان، محققان و علاقهمندان به فناوری و اتوماسیون میشود.
-
آیا برای شروع برنامه نویسی رباتیک نیاز به خرید ربات دارم؟
خیر، برای شروع میتوانید از محیطهای شبیهسازی رباتیک (مانند Gazebo، V-REP یا PyBullet) استفاده کنید که امکان آزمایش کد و الگوریتمها را بدون نیاز به ربات فیزیکی فراهم میکنند. با پیشرفت در یادگیری، میتوانید به خرید کیتهای رباتیک آموزشی سادهتر فکر کنید.
آموزش ساخت و طراحی برنامه اندروید، ساخت اپلیکیشن برای اندروید
نتیجه گیری
برنامهنویسی رباتیک تنها مهارتی فنی نیست؛ بلکه پلی است میان دنیای مجازی و واقعیت فیزیکی. درک عمیق از اصول این حوزه، انتخاب زبان مناسب، شناخت ابزارهای توسعه و آگاهی از کاربردها و چالشها، کلیدهایی هستند که میتوانند درهای نوآوری را به روی ما بگشایند.
با گسترش روزافزون هوش مصنوعی و اینترنت اشیا، رباتهایی که امروز برنامهریزی میکنیم، فردا بخشی از خانهها، بیمارستانها و حتی تصمیمگیریهای اجتماعی خواهند بود. آیندهای که در آن انسان و ربات نهتنها همکار، بلکه همفکر خواهند شد، به دستان برنامهنویسان امروز شکل خواهد گرفت.



































































































































































































































































































































{kind=link}
{kind=link}